DexCanvas: Bridging Human Demonstrations and Robot Learning for Dexterous Manipulation
DexRobot Co. Ltd. · University of Michigan · Shanghai Jiao Tong University · Chongqing University ·
East China University of Science and Technology
*Equal contribution
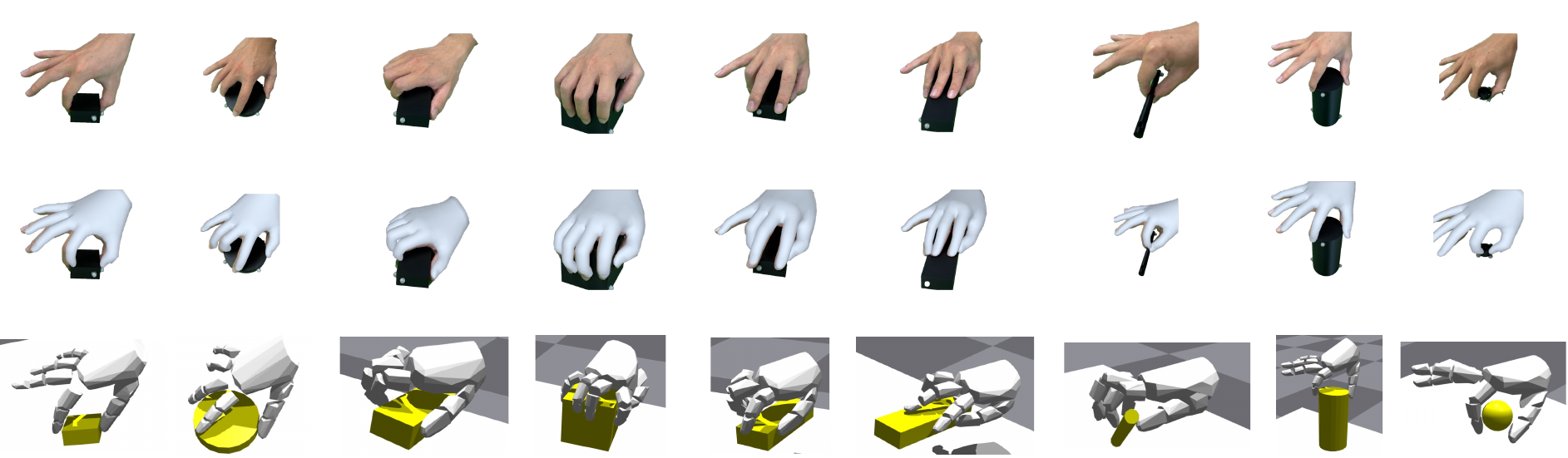
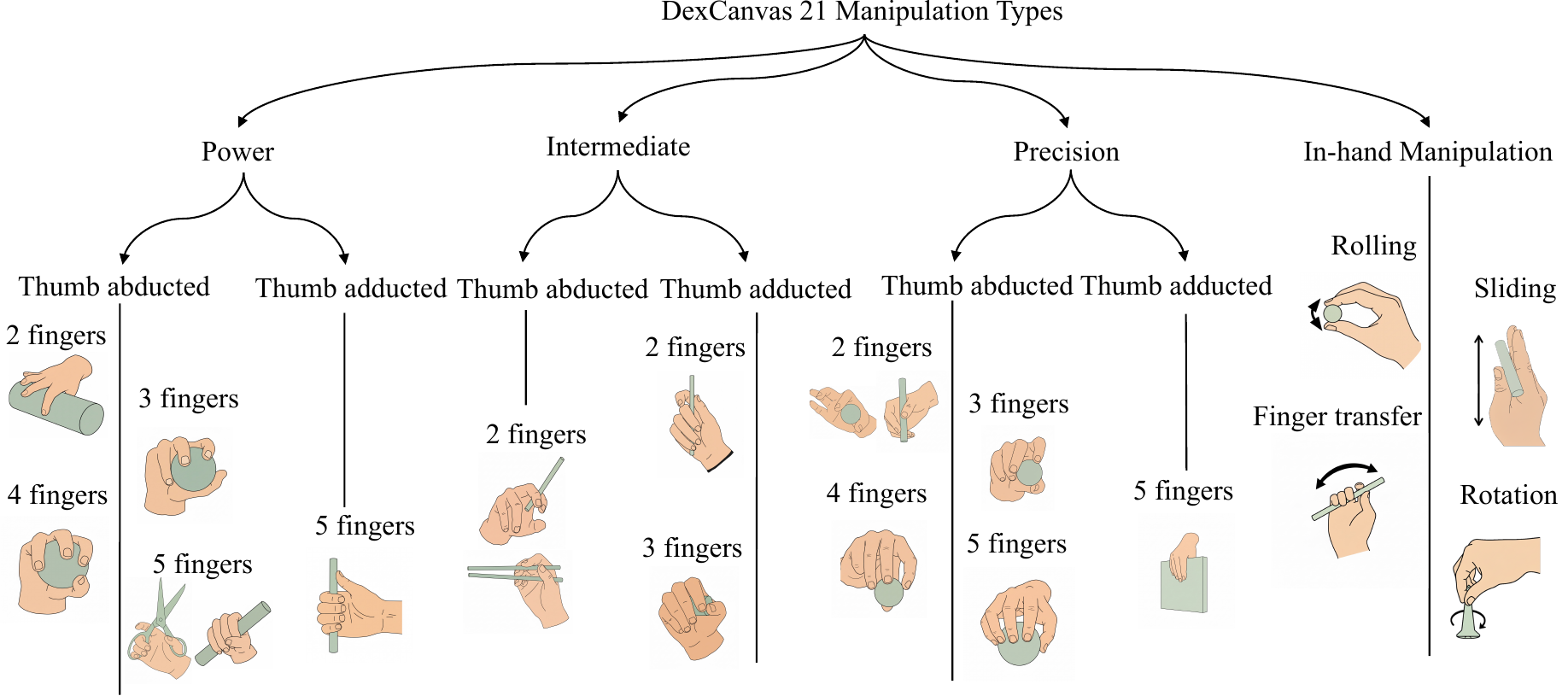
A large-scale hybrid real-synthetic dataset containing 7,000 hours of human manipulation data seeded from 70 hours of real demonstrations, organized across 21 fundamental manipulation types with physics-validated contact forces.