A large-scale hybrid real-synthetic dataset containing 7,000 hours of human manipulation data
seeded from 70 hours of real demonstrations, organized across 21 fundamental manipulation types
with physics-validated contact forces.
Flat CylinderDexHand021 ProCylinderDexHand021 ProCylinderDexHand021 ProCubeDexHand021 ProCubeDexHand021 ProCuboidDexHand021 Pro
Dataset Overview
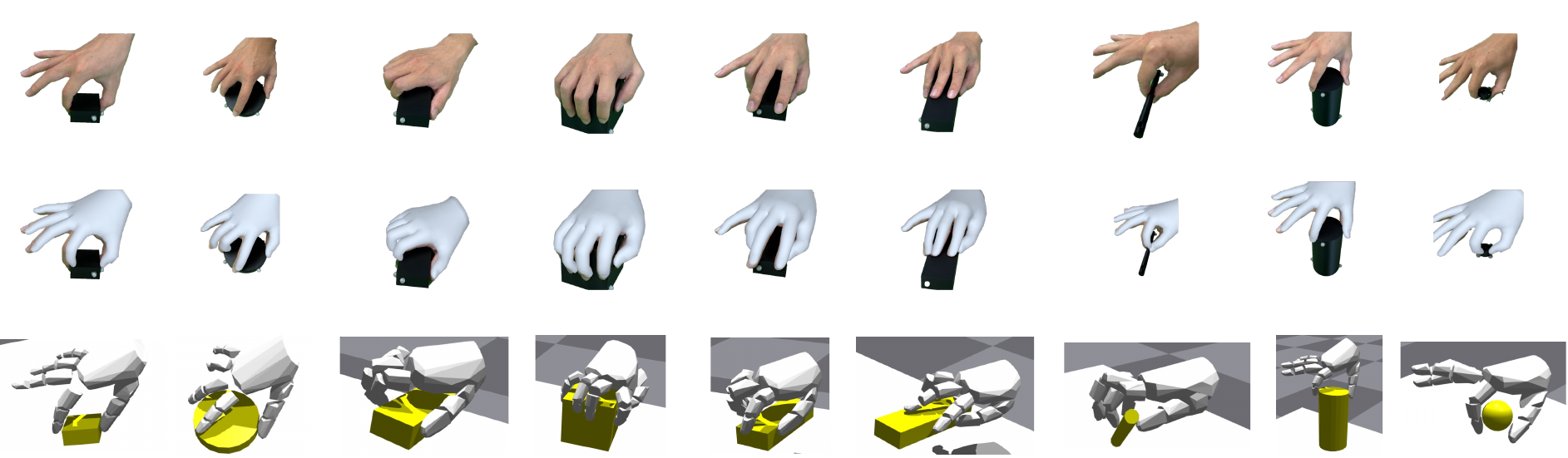
DexCanvas is a large-scale hybrid real-synthetic human manipulation dataset containing 7,000 hours
of dexterous hand-object interactions seeded from 70 hours of real human demonstrations. Each entry
combines synchronized multi-view RGB-D, high-precision mocap with MANO hand parameters, and per-frame
contact points with physically consistent force profiles.
🎯
Contact Forces
Physics-validated per-frame contact points, force vectors, and object wrenches
📊
3.0B Frames
100× expansion from 70 hours of real human demonstrations
🤝
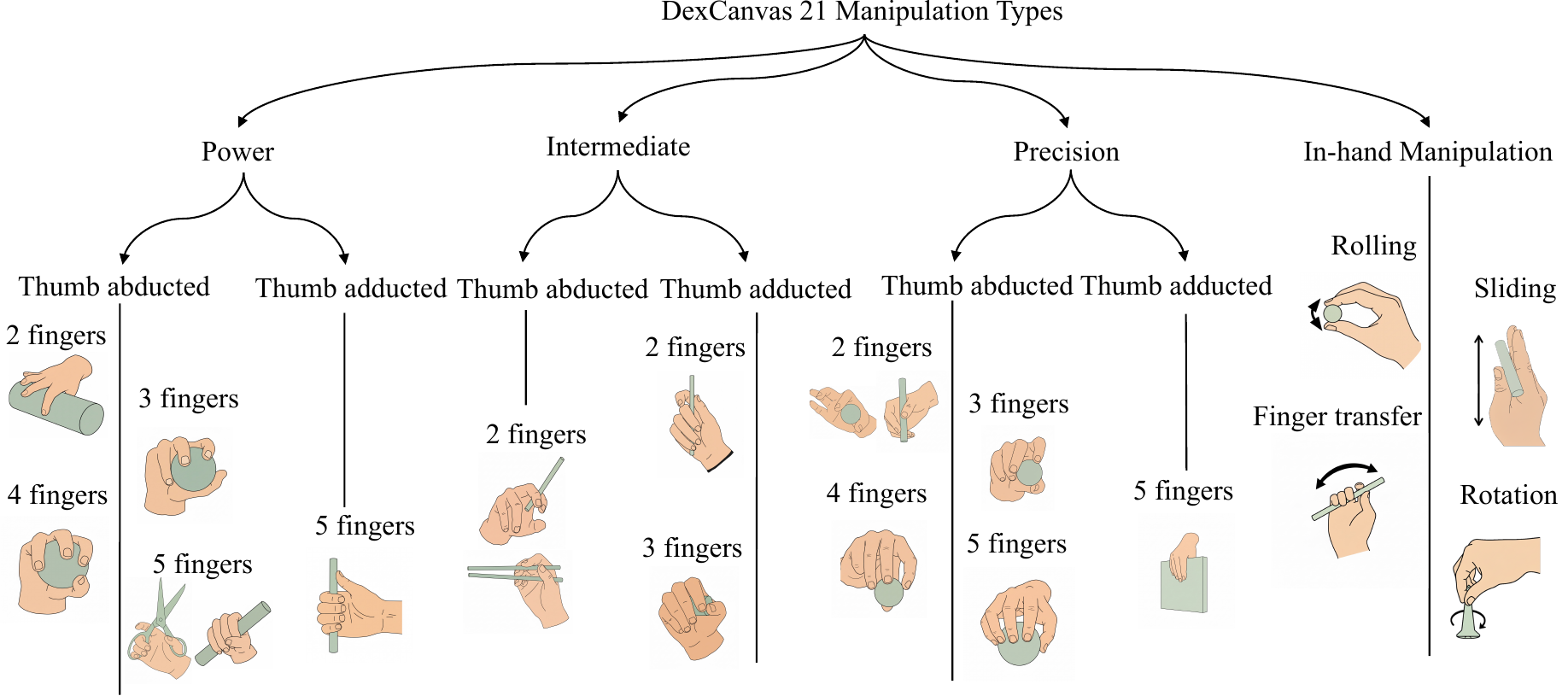
21 Types
Manipulation types from Cutkosky taxonomy
🎲
30 Objects
Geometric primitives + YCB objects
Data Processing Pipeline
1
Motion Capture Data
22-camera optical mocap system captures hand kinematics and object trajectories at 30 Hz
→
2
RL-based Force Reconstruction
Reinforcement learning policies reproduce demonstrations in physics simulation to extract contact forces
→
3
Physics-validated Annotations
Per-frame contact points, force vectors, and object wrenches measured from simulator
4
Downstream Validation
Force-conditioned Policy
DexHand021
DexHand021 Pro
Force-conditioned policy, and contact-driven retargeting to DexHand embodiments
Manipulation Types & Objects
The taxonomy hierarchically organizes manipulation strategies into four main categories: Power (whole-hand grasps),
Intermediate (transitional grasps), Precision (fingertip control), and In-hand Manipulation (dynamic reorientation).